工业用气动元件







机器人 末端执行器搜索结果
- 8 个数据中发现。 ( 1~8 显示结果 )
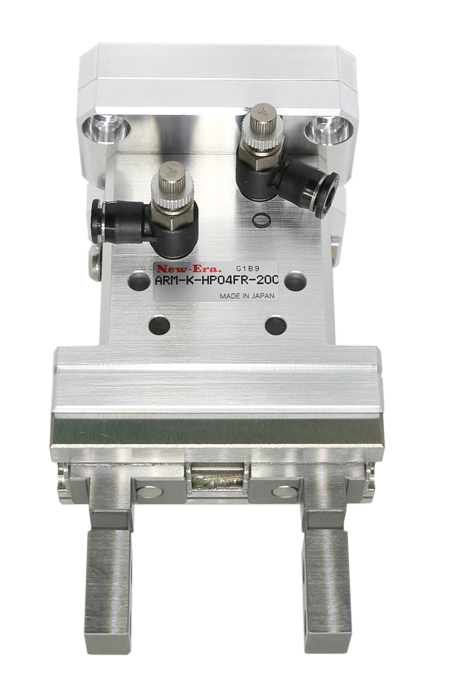
ARM-K-HP04LR-20C
特征 - 双臂水平多关节机器人“duAro 1,2” 与工业机器人 R 系列兼容。
- 包括安装附件、开/关传感器、开/关速度控制阀和安装所需的材料。
- 采用高精度和高刚性轴承,可用于长握点应用。
开闭方法 平行气爪 气缸直径 20mm 杆数 2 操作方法 双动 夹持力(闭合力)
*每个杆45.0N 行程 22.0mm 产品重量 640g~ 工作温度范围 0~60℃
(No Freezing)开关 包括 速度控制阀 包括 兼容机器人 RS-003N、RS-005N/L、RS-007N/L、duAro1、duAro2.兼容的机器人如下。 *根据夹具和工作重量选择机器人。 提供CAD数据 DXF・STEP ARM-K-HP06-14-S
特征 - 双臂水平多关节机器人“duAro 1,2” 与工业机器人 R 系列兼容。
- 包括安装附件、开/关传感器、开/关速度控制阀和安装所需的材料。
- 采用高精度和高刚性轴承,可用于长握点应用。
开闭方法 平行气爪 气缸直径 14mm 杆数 2 操作方法 双动 夹持力(闭合力)
*每个杆58.8N 行程 30.0mm 产品重量 800g~ 工作温度范围 0~60℃
(No Freezing)开关 包括 速度控制阀 包括 兼容机器人 RS-003N、RS-005N/L、RS-007N/L、duAro1、duAro2.兼容的机器人如下。 *根据夹具和工作重量选择机器人。 提供CAD数据 DXF・STEP HP04VR-20C-ASSISTA (Type:NPN)
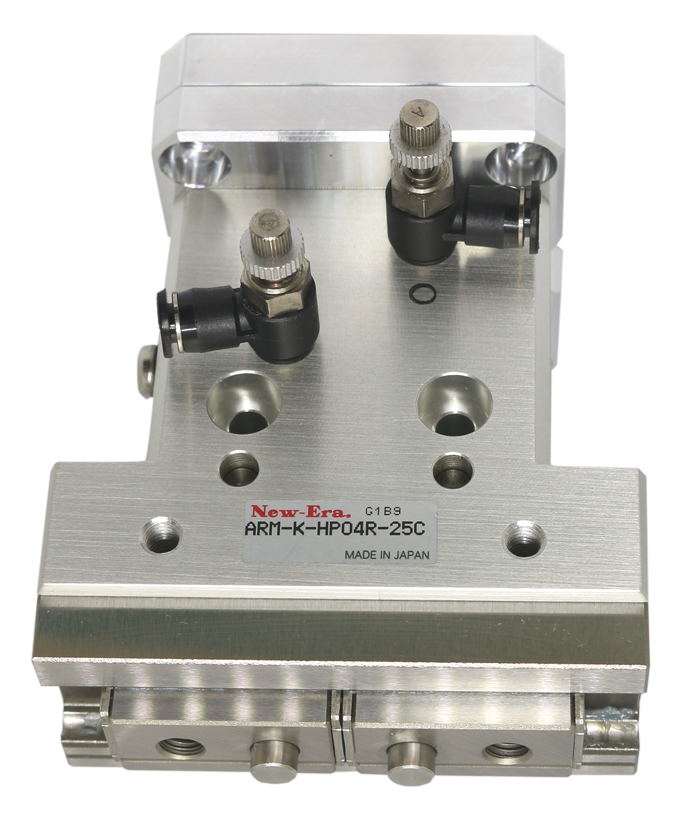
HP04VR-20C-ASSISTAーA (Type:PNP)特征 - 与三菱 ASSISTA 即插即用兼容的平行式气爪
- 采用高精度和高刚性轴承,可用于长握点应用。
- 包括安装附件、开/关传感器、开/关速度控制阀以及安装所需的材料。
开闭方法 平行气爪 气缸直径 20mm 杆数 2 操作方法 双动 夹持力(闭合力)
*每个杆45.0N 行程 14.0mm 产品重量 950g~ 工作温度范围 0~60℃ 开关 包括 速度控制阀 包括 兼容机器人 MELFA ASSISTA 提供CAD数据 HP04VR-20C-CRX
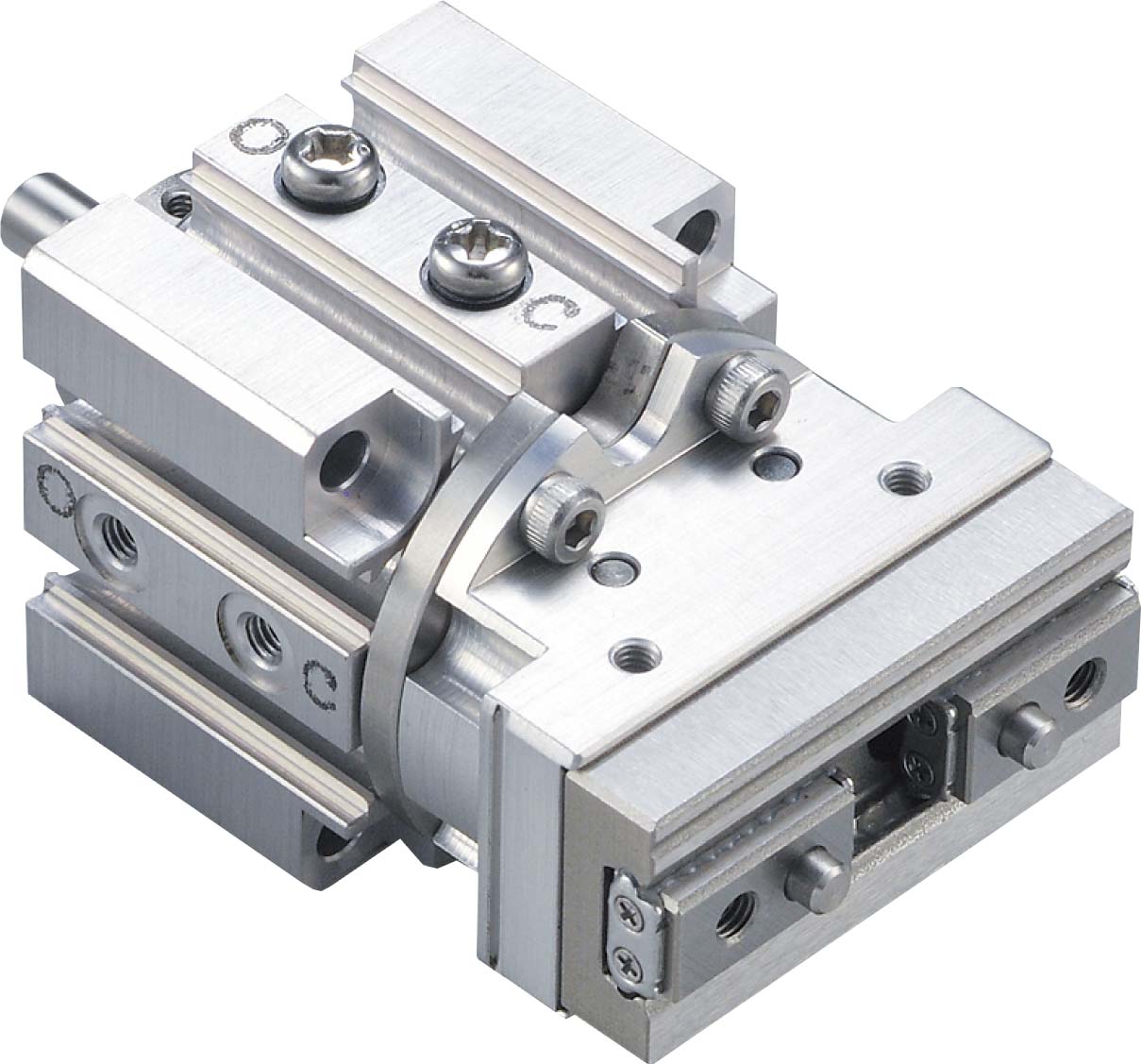
特征 - 空气 夹持器适用于 FANUC CRX 系列
- CRX系列EE连接器接头用
- 使用直线导轨,可以长点夹持
- 安装附件、开/关传感器、开/关速度控制阀和安装所需的所有部件都包括在内。
开闭方法 平行线性夹持器 气缸直径 20mm 杆数 2 操作方法 双作用型 夹持力(闭合力)
*每个杆48N 行程 14.0mm 产品重量 880g~ 工作温度范围 开关 附上 速度控制阀 附上 兼容机器人 FANUC CRX系列 提供CAD数据 关于插件的 ipl 文件
解压下载的 zip 文件并在其中安装“ipl 文件”。