空気圧機器製品
- 製品検索
-
フリーワード検索製品カテゴリ選択



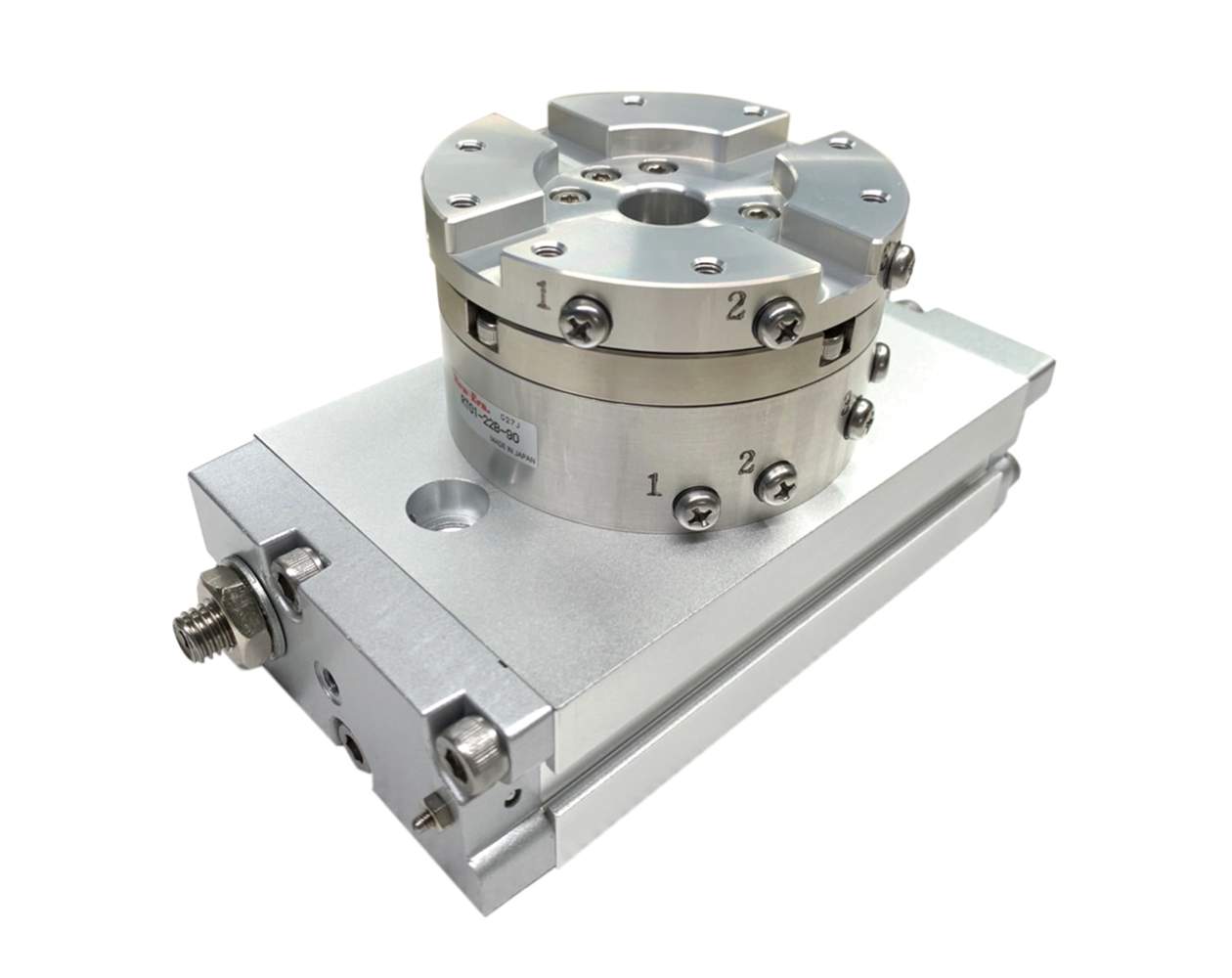


電動空気圧ロボット エンドエフェクタ
- 表示するデータがありません。
ARM-K-HP04LR-20C
| 特徴 |
|
|---|
| 開閉方式 | 平行移動形エアハンド | ||
|---|---|---|---|
| シリンダ径 | 20mm | レバー数 | 2 |
| 作動方式 | 複動 | 把持力(閉力) *レバー1つ当り | 45.0N |
| ストローク | 22.0mm | 製品質量 | 640g~ |
| 使用温度範囲 | 0~60℃ (凍結無き事) |
||
| スイッチ | 有 | 開閉速度弁 | 有 |
| 対応ロボット | 双腕スカラロボット「duAro1,2」、産業用ロボットRシリーズ | ||
| 提供CADデータ プラグイン |
|||

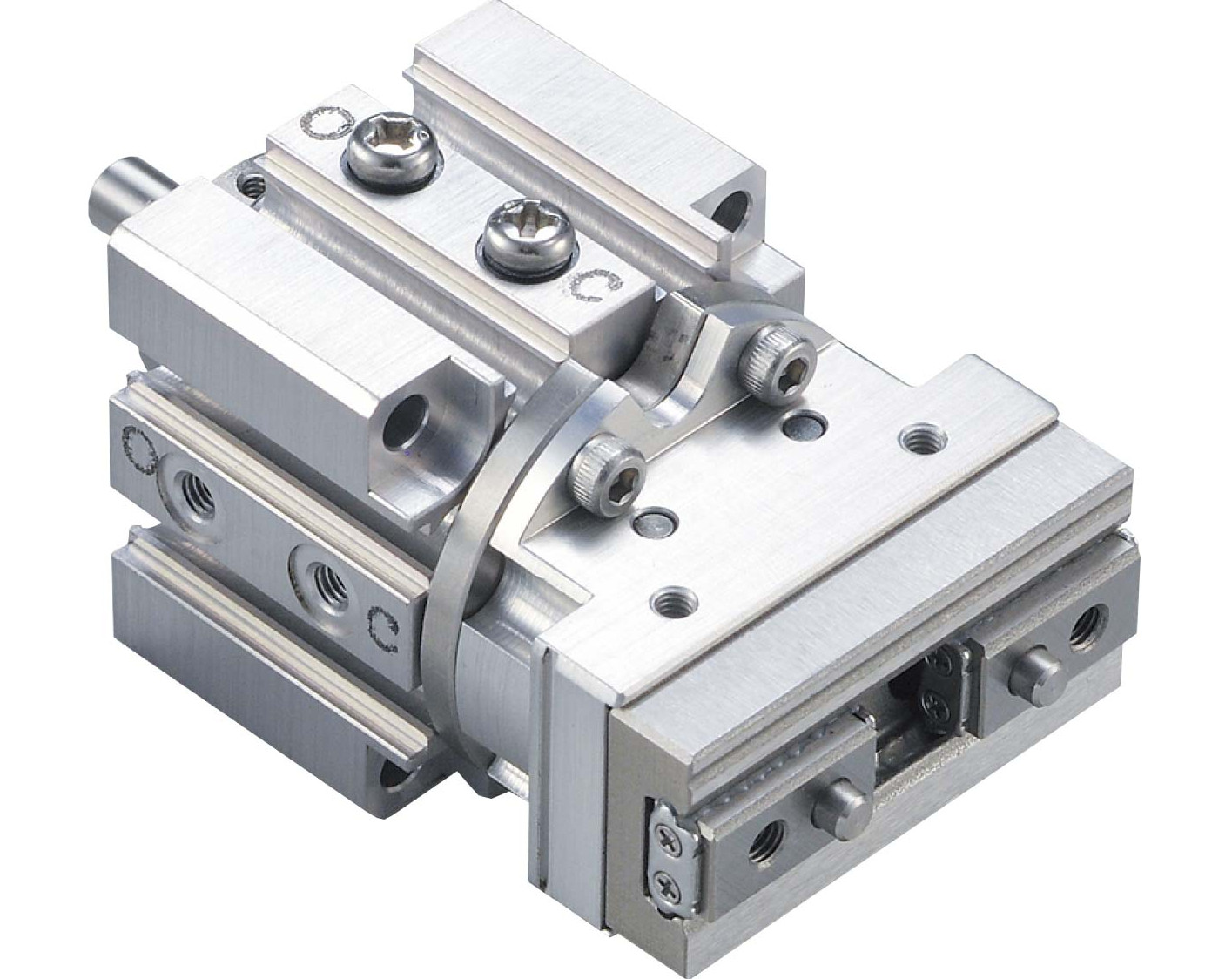
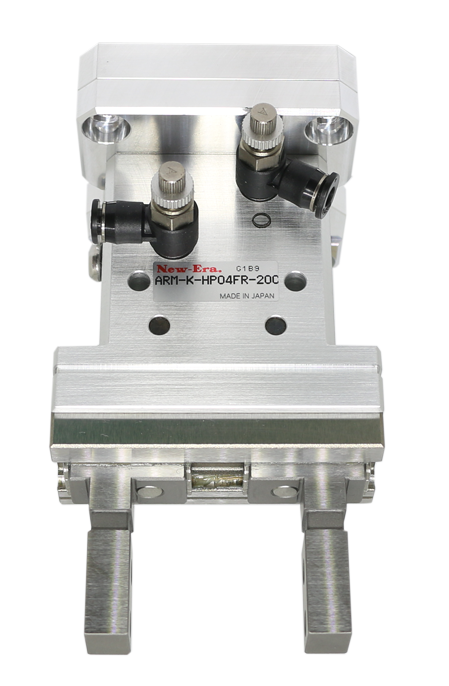
ARM-K-HP04FR-20C
| 特徴 |
|
|---|
| 開閉方式 | 平行移動形エアハンド | ||
|---|---|---|---|
| シリンダ径 | 20mm | レバー数 | 2 |
| 作動方式 | 複動 | 把持力(閉力) *レバー1つ当り | 49.0N |
| ストローク | 14.0mm | 製品質量 | 640g~ |
| 使用温度範囲 | 0~60℃ (凍結無き事) |
||
| スイッチ | 有 | 開閉速度弁 | 有 |
| 対応ロボット | 産業用ロボットRシリーズ | ||
| 提供CADデータ プラグイン |
DXF・STEP | ||
ARM-K-HP04R-25C
| 特徴 |
|
|---|
| 開閉方式 | 平行移動形エアハンド | ||
|---|---|---|---|
| シリンダ径 | 25mm | レバー数 | 2 |
| 作動方式 | 複動 | 把持力(閉力) *レバー1つ当り | 82.0N |
| ストローク | 18.0mm | 製品質量 | 720g~ |
| 使用温度範囲 | 0~60℃ (凍結無き事) |
||
| スイッチ | 有 | 開閉速度弁 | 有 |
| 対応ロボット | 産業用ロボットRシリーズ | ||
| 提供CADデータ プラグイン |
|||

ARM-K-HP06-14-S
| 特徴 |
|
|---|
| 開閉方式 | 平行移動形エアハンド | ||
|---|---|---|---|
| シリンダ径 | 14mm | レバー数 | 2 |
| 作動方式 | 複動 | 把持力(閉力) *レバー1つ当り | 58.8N |
| ストローク | 30.0mm | 製品質量 | 800g~ |
| 使用温度範囲 | 0~60℃ (凍結無き事) |
||
| スイッチ | 有 | 開閉速度弁 | 有 |
| 対応ロボット | 双腕スカラロボット「duAro1,2」、産業用ロボットRシリーズ | ||
| 提供CADデータ プラグイン |
|||

ARM-K-HP06-18-S
| 特徴 |
|
|---|
| 開閉方式 | 平行移動形エアハンド | ||
|---|---|---|---|
| シリンダ径 | 18mm | レバー数 | 2 |
| 作動方式 | 複動 | 把持力(閉力) *レバー1つ当り | 107.8N |
| ストローク | 40.0mm | 製品質量 | 1100g~ |
| 使用温度範囲 | 0~60℃ (凍結無き事) |
||
| スイッチ | 有 | 開閉速度弁 | 有 |
| 対応ロボット | 産業用ロボットRシリーズ | ||
| 提供CADデータ プラグイン |
|||

ARM-K-HP06-25-S
| 特徴 |
|
|---|
| 開閉方式 | 平行移動形エアハンド | ||
|---|---|---|---|
| シリンダ径 | 25mm | レバー数 | 2 |
| 作動方式 | 複動 | 把持力(閉力) *レバー1つ当り | 208.3N |
| ストローク | 50.0mm | 製品質量 | 2100g~ |
| 使用温度範囲 | 0~60℃ (凍結無き事) |
||
| スイッチ | 有 | 開閉速度弁 | 有 |
| 対応ロボット | 産業用ロボットRシリーズ | ||
| 提供CADデータ プラグイン |
|||

製品検索
フリーワード検索
製品カテゴリ選択
ロボットエンドエフェクタ



空気圧機器製品